Linear Algebra & Applications
2201NSC
Affine Transformations
What are affine transformations?
An affine transformation maps points, straight lines and planes while preserving parallelism — parallel lines stay parallel.
Widely used in geometry, computer graphics and vision to map coordinates while keeping geometric relations. Unlike linear transformations, affine transforms can also translate (shift) the space.
What are affine transformations?
This generalisation makes affine transformations particularly useful for:
- Representing more general geometric deformations
- Modelling transformations where position changes matter
Affine Transformations
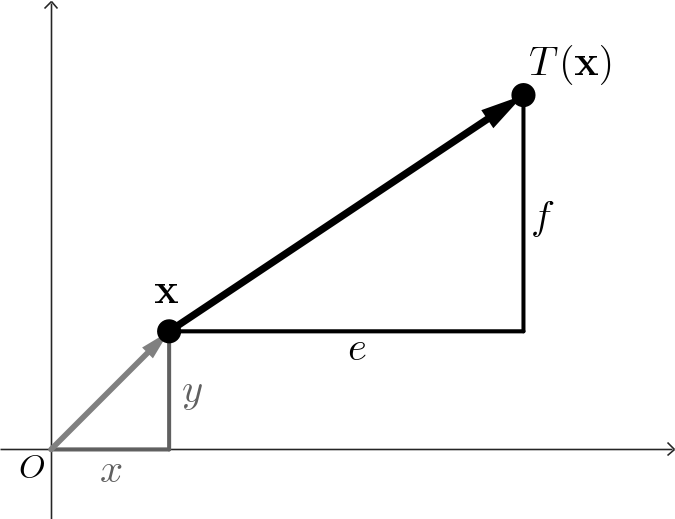
Consider a point $\mathbf x=(x,y).$ A transformation $T: \mathbb R^2 \to \mathbb R^2$ of the form
\( \mathbf{T\left( \mathbf x\right)} = \begin{pmatrix} ax + by + e \\ cx + dy + f \end{pmatrix} \)
where $a,b,c,d,e$ and $f$ are real numbers, is called a two-dimensional affine transformation.
Affine Transformations
|
\( \mathbf{T\left( \mathbf x\right)} = \begin{pmatrix} ax + by + e \\ cx + dy + f \end{pmatrix} \) For example, if $a,d = 1,$ and $b,c=0,$ then we have a pure translation \[ \mathbf{T\left( \mathbf x\right)} = \begin{pmatrix} x + e \\ y + f \end{pmatrix} \] |
|
Affine Transformations
|
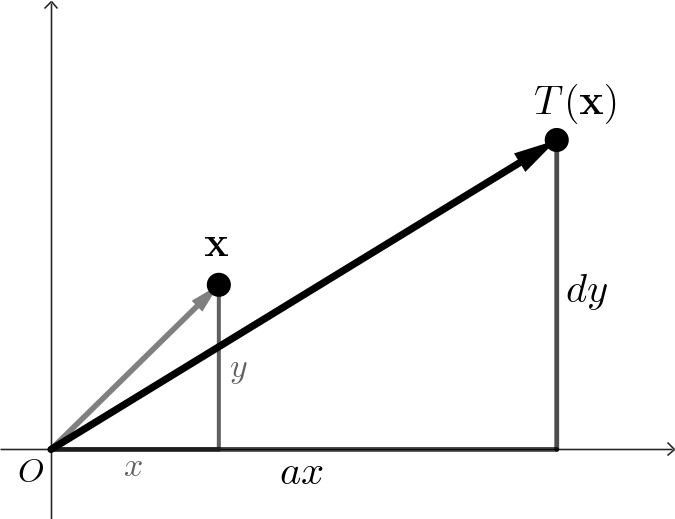
\( \mathbf{T\left( \mathbf x\right)} = \begin{pmatrix} ax + by + e \\ cx + dy + f \end{pmatrix} \) If $b,c=0$ and $e,f=0;$ then we have a pure scale \[ \mathbf{T\left( \mathbf x\right)} = \begin{pmatrix} ax \\ dy \end{pmatrix} \] |
|
Affine Transformations
|
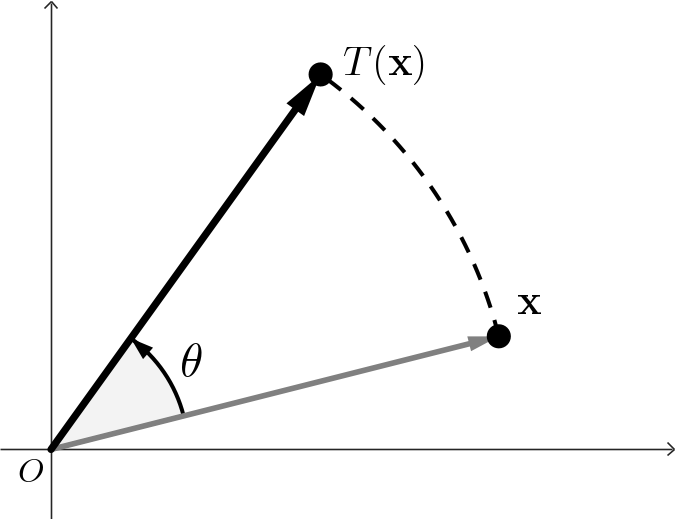
\( \mathbf{T\left( \mathbf x\right)} = \begin{pmatrix} ax + by + e \\ cx + dy + f \end{pmatrix} \) If $a,d = \cos \theta,$ $b = -\sin \theta,$ $c = \sin \theta,$ and $e,f=0,$ then we have a pure rotation about the origin \[ \small \mathbf{T\left( \mathbf x\right)} = \begin{pmatrix} x\cos\theta -y \sin \theta \\ x\sin \theta + y \cos \theta \end{pmatrix} \] |
|
Affine Transformations
|
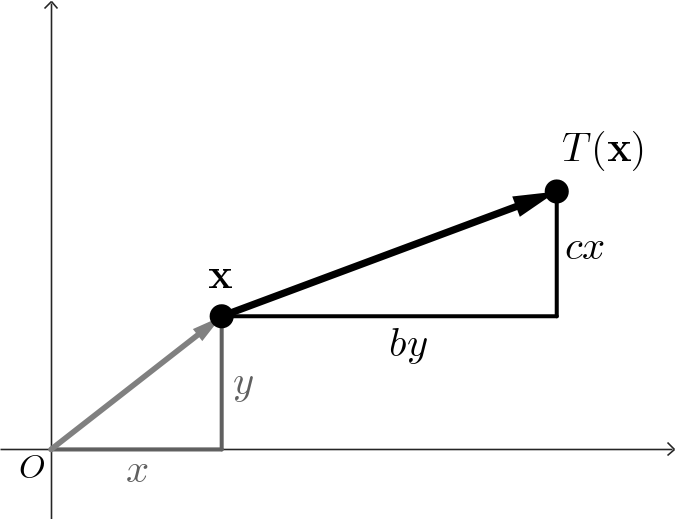
\( \mathbf{T\left( \mathbf x\right)} = \begin{pmatrix} ax + by + e \\ cx + dy + f \end{pmatrix} \) Finally, if $a,d=1,$ and $e,f=0;$ we have the shear transforms \[ \mathbf{T\left( \mathbf x\right)} = \begin{pmatrix} x+ by \\ y+ cx \end{pmatrix} \] |
|
Matrix representation of affine transformations
We know a linear transformation can be written in matrix form
\(T(\mathbf{x}) = \begin{pmatrix} ax + by \\ cx + dy \end{pmatrix} \) \( = \begin{pmatrix} a & b \\ c & d \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix}, \)
Can we do the same with affine transformations? 🤔
No, the problem is the translation❗️
Homogeneous coordinates
To enable affine transformations, such as translation, to be represented using matrix multiplication, we embed these 2D vectors into 3D space using homogeneous coordinates by appending a third coordinate, conventionally set to 1:
\( \begin{pmatrix} x \\ y \end{pmatrix} \) \( \quad \Rightarrow \quad \begin{pmatrix} x \\ y \\ 1 \end{pmatrix}. \)
This third coordinate is typically called \(w\) to distinguish it from the usual \(z\)-coordinate in 3D geometry.
Homogeneous coordinates
Therefore, affine transformations can be written as
Homogeneous coordinates
Affine transformations
Homogeneous coordinates
| $\begin{pmatrix} s_x & 0 & 0 \\ 0 & s_y & 0 \\ 0 & 0 & 1 \end{pmatrix}$ | $\begin{pmatrix} \cos \theta & -\sin \theta & 0 \\ \sin \theta & \cos \theta & 0 \\ 0 & 0 & 1 \end{pmatrix}$ |
|
Scale |
Rotation |
| $\begin{pmatrix}1 & h_x & 0 \\ h_y & 1 & 0 \\ 0 & 0 & 1 \end{pmatrix}$ | $\begin{pmatrix} 1 & 0 & \Delta x \\ 0 & 1 & \Delta y \\ 0 & 0 & 1 \end{pmatrix}$ |
| Shear | Translation |
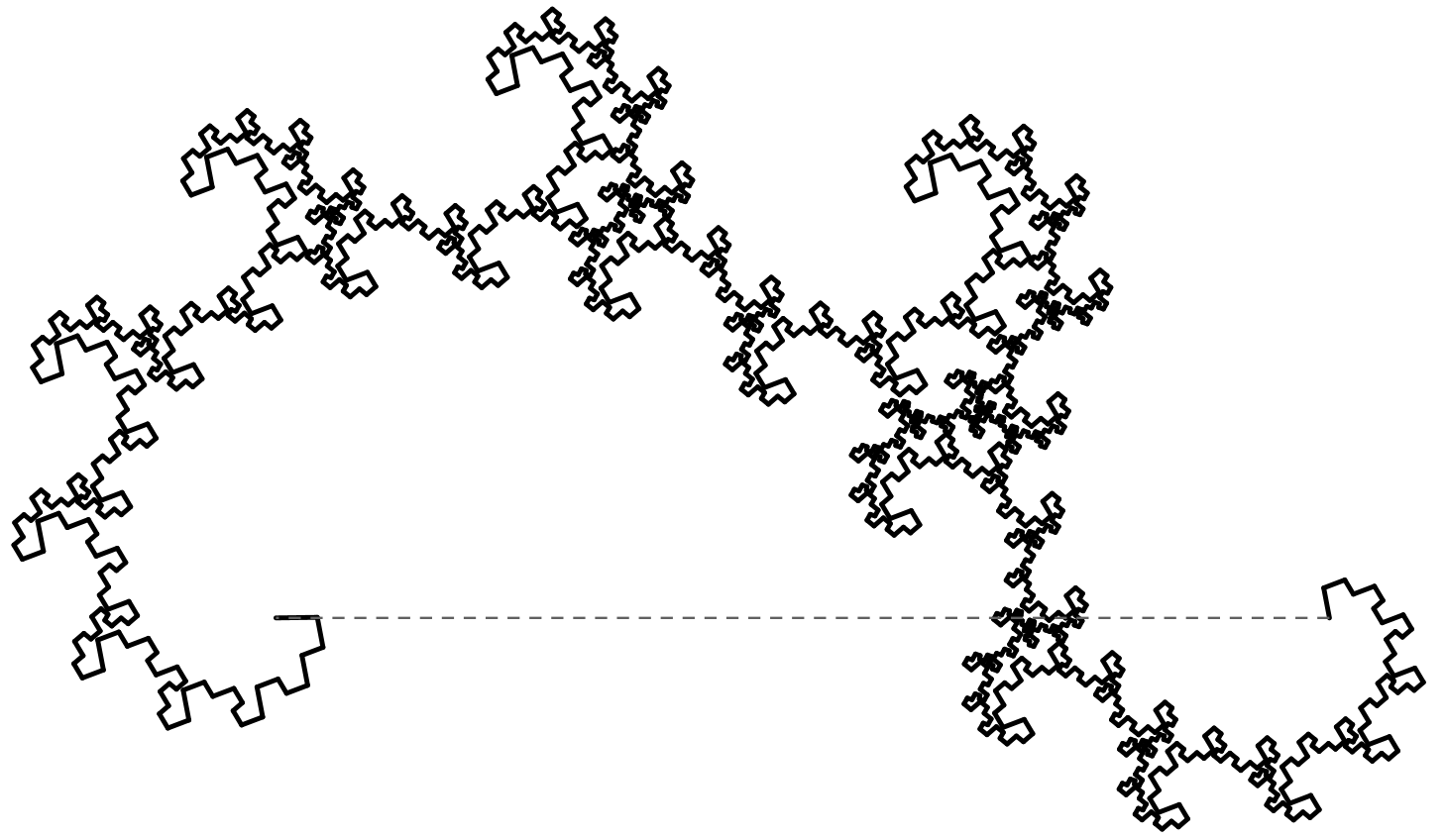
Affine transformations & Fractals
An IFS consists of a finite set of affine transformations \( \{T_1, T_2, \dots, T_n\},\) each of the form:
\( T_i(\mathbf{x}) = A_i \mathbf{x} + \mathbf{t}_i, \)
where \( A_i \) is a \(2 \times 2\) matrix representing a linear transformation (scaling, rotation, or shearing), and \( \mathbf{t}_i \) is a translation vector.
Affine transformations & Fractals
An IFS consists of a finite set of affine transformations \( \{T_1, T_2, \dots, T_n\},\) each of the form:
\( T_i(\mathbf{x}) = A_i \mathbf{x} + \mathbf{t}_i, \)
There are two common approaches for plotting fractals using IFS:
- Deterministic Algorithm: Apply all transformations to a set of points in each iteration.
- Random (or Probabilistic) Algorithm: At each step, apply one randomly chosen transformation according to a probability distribution.
Deterministic IFS
We apply the following affine transformations at each iteration:
\( \begin{aligned} T_1(\mathbf x) &= \begin{pmatrix} 0.5 & 0 & 0\\ 0 & 0.5 & 0 \\ 0 & 0 & 1 \end{pmatrix} \begin{pmatrix} x \\ y \\ 1 \end{pmatrix}, \\[1ex] T_2(\mathbf{x}) &= \begin{pmatrix} 0.5 & 0 & 0 \\ 0 & 0.5 & 100 \\ 0 & 0 & 1\end{pmatrix} \begin{pmatrix} x \\ y \\ 1 \end{pmatrix}, \\[1ex] T_3(\mathbf{x}) &= \begin{pmatrix} 0.5 & 0 & 100 \\ 0 & 0.5 & 100 \\ 0 & 0 & 1\end{pmatrix} \begin{pmatrix} x \\ y \\ 1 \end{pmatrix}. \end{aligned} \)
Deterministic IFS: JavaScript
|
\( \begin{aligned} T_1(\mathbf x) &= \begin{pmatrix} 0.5 & 0 & 0\\ 0 & 0.5 & 0 \\ 0 & 0 & 1 \end{pmatrix} \begin{pmatrix} x \\ y \\ 1 \end{pmatrix}, \end{aligned} \) \( \begin{aligned} T_2(\mathbf{x}) &= \begin{pmatrix} 0.5 & 0 & 0 \\ 0 & 0.5 & 100 \\ 0 & 0 & 1\end{pmatrix} \begin{pmatrix} x \\ y \\ 1 \end{pmatrix}, \end{aligned} \) \( \begin{aligned} T_3(\mathbf{x}) &= \begin{pmatrix} 0.5 & 0 & 100 \\ 0 & 0.5 & 100 \\ 0 & 0 & 1\end{pmatrix} \begin{pmatrix} x \\ y \\ 1 \end{pmatrix}. \end{aligned} \) |
|
Deterministic IFS: JavaScript
Probabilistic IFS
We apply the following affine transformations, with a given probability for each case:
|
$ \begin{aligned} T_1(\mathbf{x}) &= \begin{pmatrix} 0 & 0 & 0 \\ 0 & 0.16 & 0 \\ 0 & 0 & 1 \end{pmatrix} \begin{pmatrix} x \\ y \\ 1 \end{pmatrix}, \\[1ex] T_2(\mathbf{x}) &= \begin{pmatrix} 0.85 & 0.04 & 0 \\ -0.04 & 0.85 & 1.6 \\ 0 & 0 & 1 \end{pmatrix} \begin{pmatrix} x \\ y \\ 1 \end{pmatrix}, \\[1ex] T_3(\mathbf{x}) &= \begin{pmatrix} 0.2 & -0.26 & 0 \\ 0.23 & 0.22 & 1.6 \\ 0 & 0 & 1 \end{pmatrix} \begin{pmatrix} x \\ y \\ 1 \end{pmatrix}, \\[1ex] T_4(\mathbf{x}) &= \begin{pmatrix} -0.15 & 0.28 & 0 \\ 0.26 & 0.24 & 0.44 \\ 0 & 0 & 1 \end{pmatrix} \begin{pmatrix} x \\ y \\ 1 \end{pmatrix}. \end{aligned} $ |
|
Probabilistic IFS
IFS values for a fern
| T | a | b | c | d | e | f | p |
|---|---|---|---|---|---|---|---|
| 1 | 0 | 0 | 0 | 0.16 | 0 | 0 | 0.01 |
| 2 | 0.85 | 0.04 | -0.04 | 0.85 | 0 | 1.6 | 0.85 |
| 3 | 0.2 | -0.26 | 0.23 | 0.22 | 0 | 1.6 | 0.07 |
| 4 | -0.15 | 0.28 | 0.26 | 0.24 | 0 | 0.44 | 0.07 |
Probabilistic IFS: JavaScript
|
$ \begin{aligned} T_1(\mathbf{x}) &= \begin{pmatrix} 0 & 0 & 0 \\ 0 & 0.16 & 0 \\ 0 & 0 & 1 \end{pmatrix} \begin{pmatrix} x \\ y \\ 1 \end{pmatrix} \end{aligned} \mapsto 0.01 $ $ \begin{aligned} T_2(\mathbf{x}) &= \begin{pmatrix} 0.85 & 0.04 & 0 \\ -0.04 & 0.85 & 1.6 \\ 0 & 0 & 1 \end{pmatrix} \begin{pmatrix} x \\ y \\ 1 \end{pmatrix} \end{aligned} \mapsto 0.85 $ $ \begin{aligned} T_3(\mathbf{x}) &= \begin{pmatrix} 0.2 & -0.26 & 0 \\ 0.23 & 0.22 & 1.6 \\ 0 & 0 & 1 \end{pmatrix} \begin{pmatrix} x \\ y \\ 1 \end{pmatrix} \end{aligned} \mapsto 0.07 $ $ \begin{aligned} T_4(\mathbf{x}) &= \begin{pmatrix} -0.15 & 0.28 & 0 \\ 0.26 & 0.24 & 0.44 \\ 0 & 0 & 1 \end{pmatrix} \begin{pmatrix} x \\ y \\ 1 \end{pmatrix} \end{aligned} \mapsto 0.07 $ |
|